|
ENGINEERING
|

STRYDER
Date:
Produced for:
Team members: |
September - December 2015
4th-year Capstone project, Computer Aided Design (MCG 4322)
Jonathan Bédard Schami, Olivier Miguel |
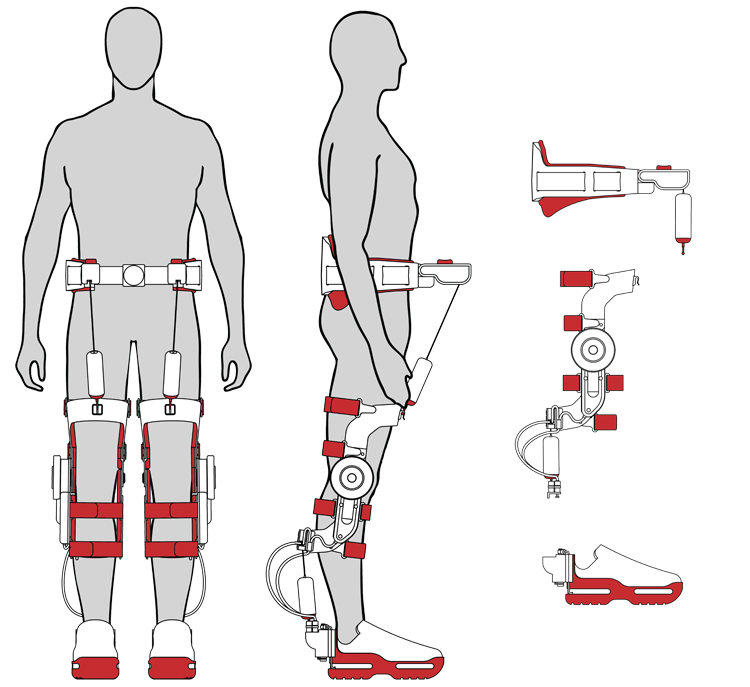
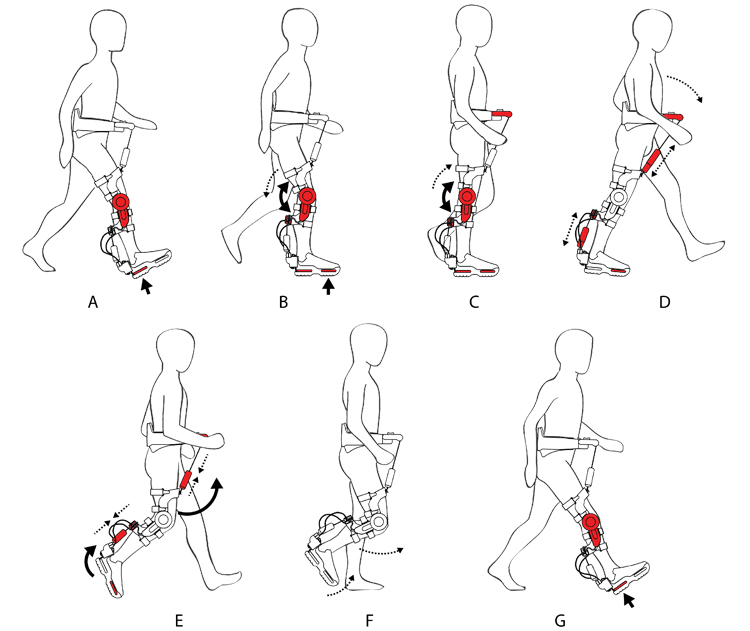
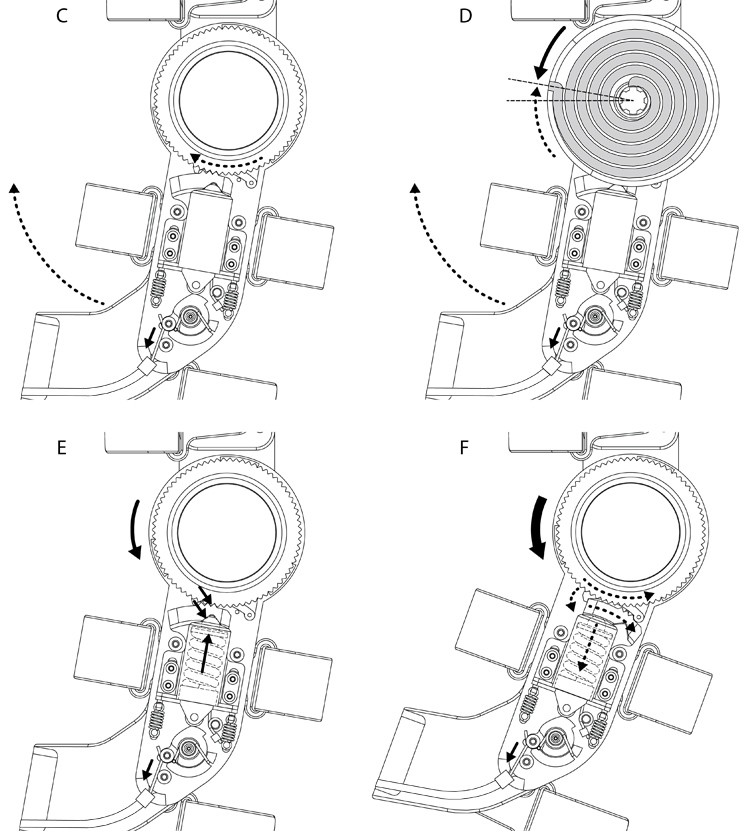
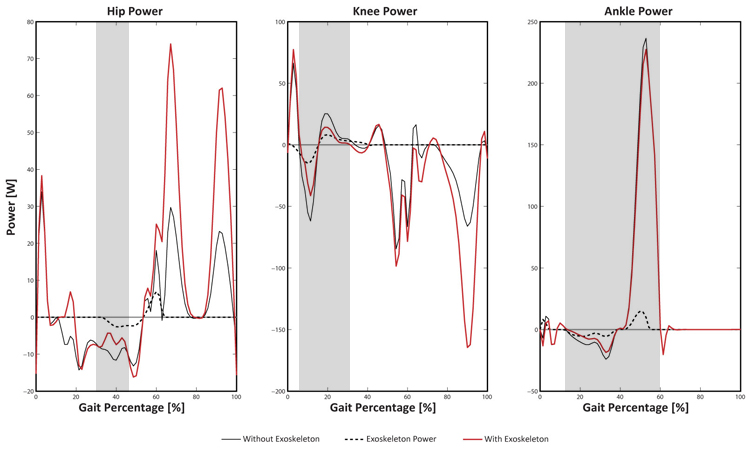
The STRYDER is a passive assistive exoskeleton designed to increase the efficiency of walking, thereby extending the user’s walking range. The STRYDER’s design was inspired by three conceptual pillars: harvesting the potential energy of the user’s centre of mass and releasing the energy at critical points in the gait cycle, precluding any restriction to natural joint motion so as to avoid compromising natural stability during gait, and utilising consistent and reliable event-based actuation triggers in order to ensure proper device operation for all users.
|
